Part of Senior Design team that implemented a low powered autonomous robot. Responsible for managing and
leading the team and developing the algorithms and program in C++ on an Arduino Uno Wi-Fi Rev2. In C++,
programmed multiple peripherals and sensors such as photoelectric, ultrasonic, and GPS to gather data and use it
for the general autonomous functions and PID algorithms. Also aided in the integration of the web application and
Bluetooth communication using C++.

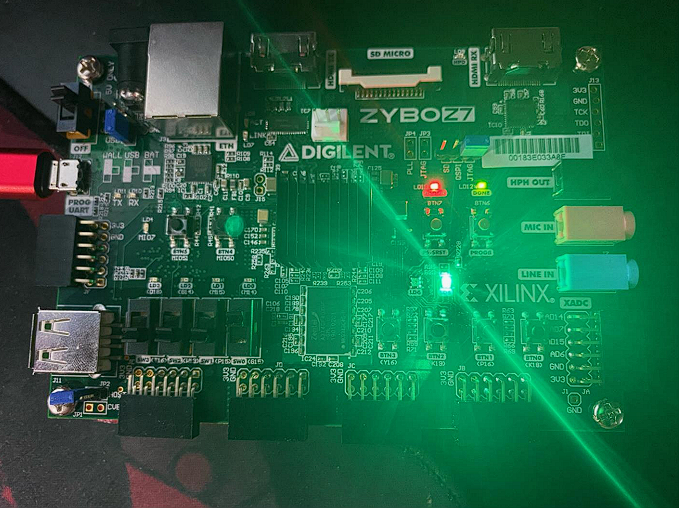
Implemented on a Zybo-Z7020, a device with real-time HDMI signal processing and modified with Verilog and C++. The FPGA board is tought to read and manipulate
images through the interaction of UART, and the same image to be displayed on the other. A UART interface is used to configure what is output through the HDMI
and three-frame buffer are used to help us manipulate what to display.
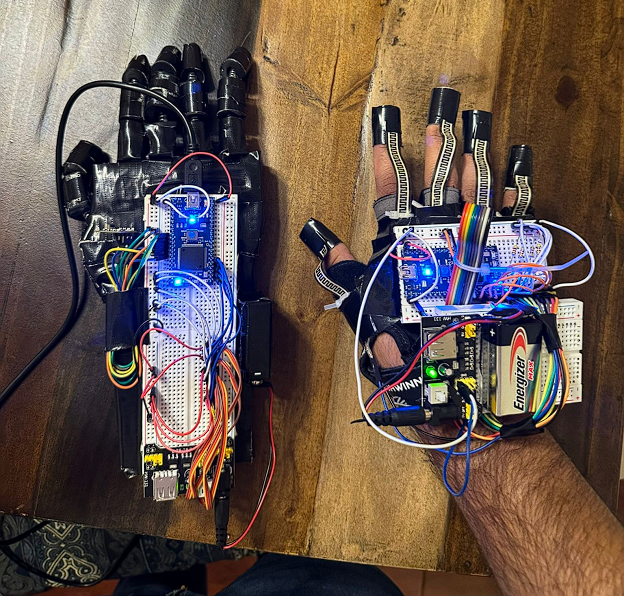
Implemented on 2 LPC1768 32-bit ARM Cortex-M3 microcontrollers a robotic hand that would react based on the
movement of a glove fitted with multiple flex sensors and a NRF24L01+ wireless transceiver module to transfer data.
Programmed in C on Keil studios and developed the algorithm and protocol for receiving and interpreting the data.
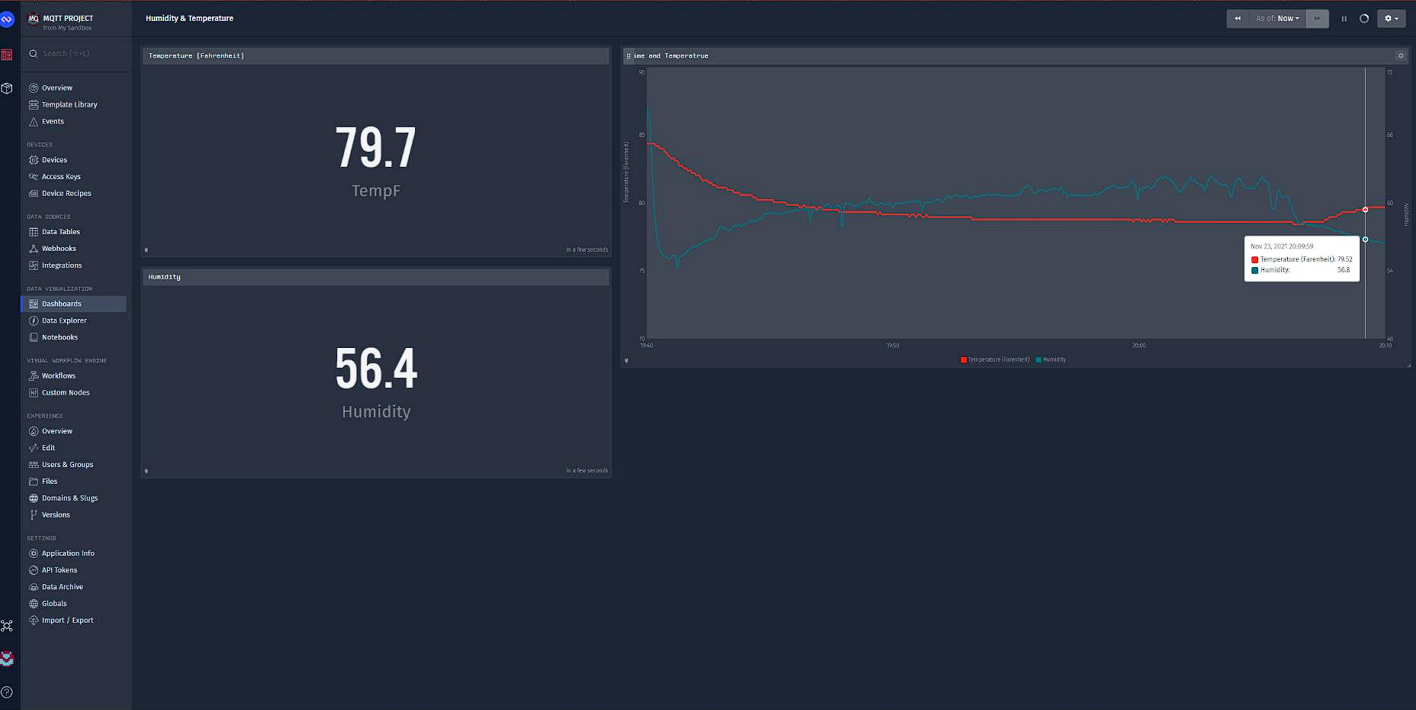
Modeled and designed a small low power consuming prototype that collects data of temperature and humidity using
Losant Broker MQTT protocol. Was programmed on esp8266 microcontroller in C++, used a SHT30-D sensor and the
on board WIFI module to collect and transmit data.
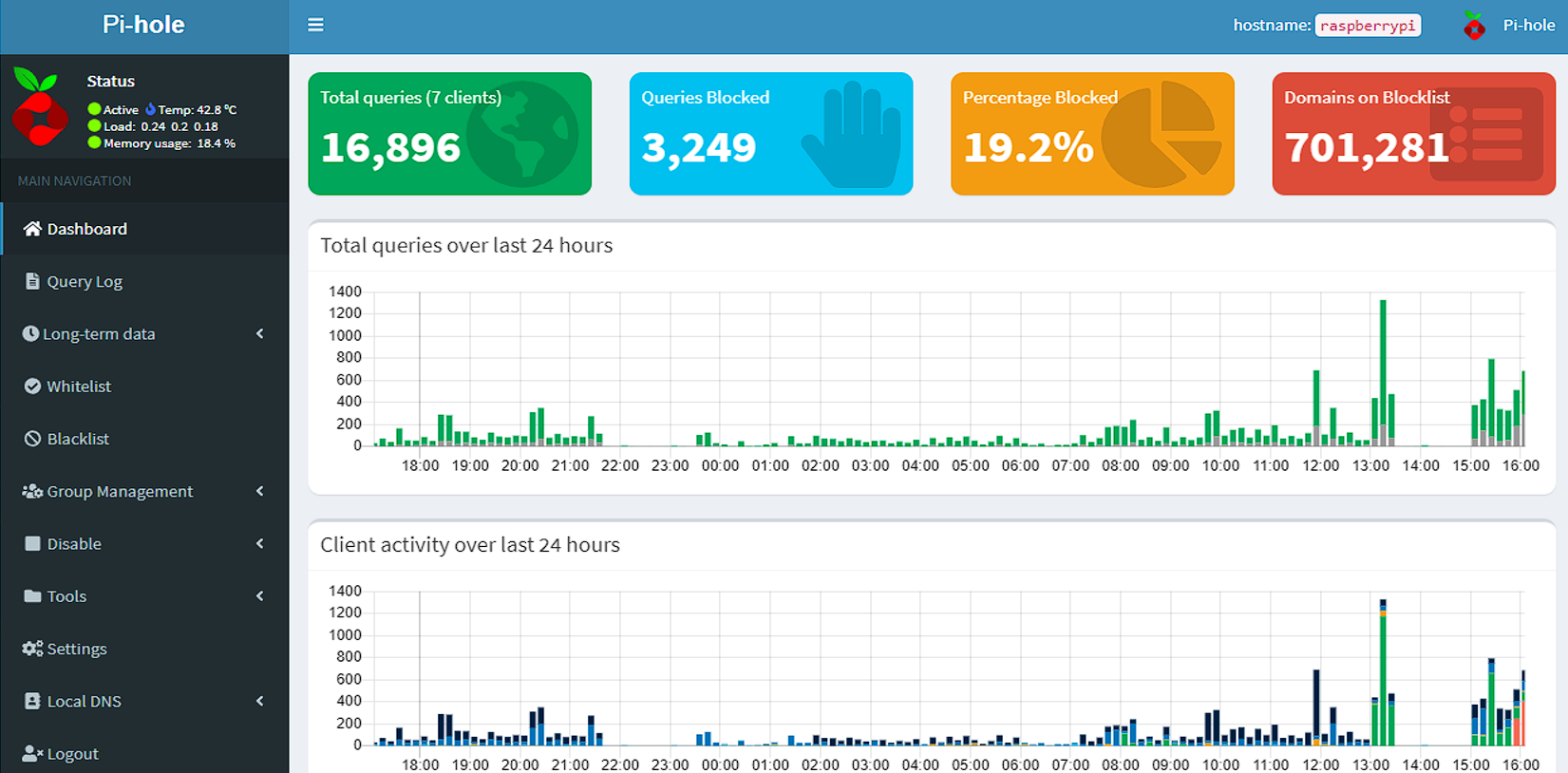
Designed and implemented a small low powered and portable functioning Ad blocker to reduce/remove the ads
presented on apps like free games.
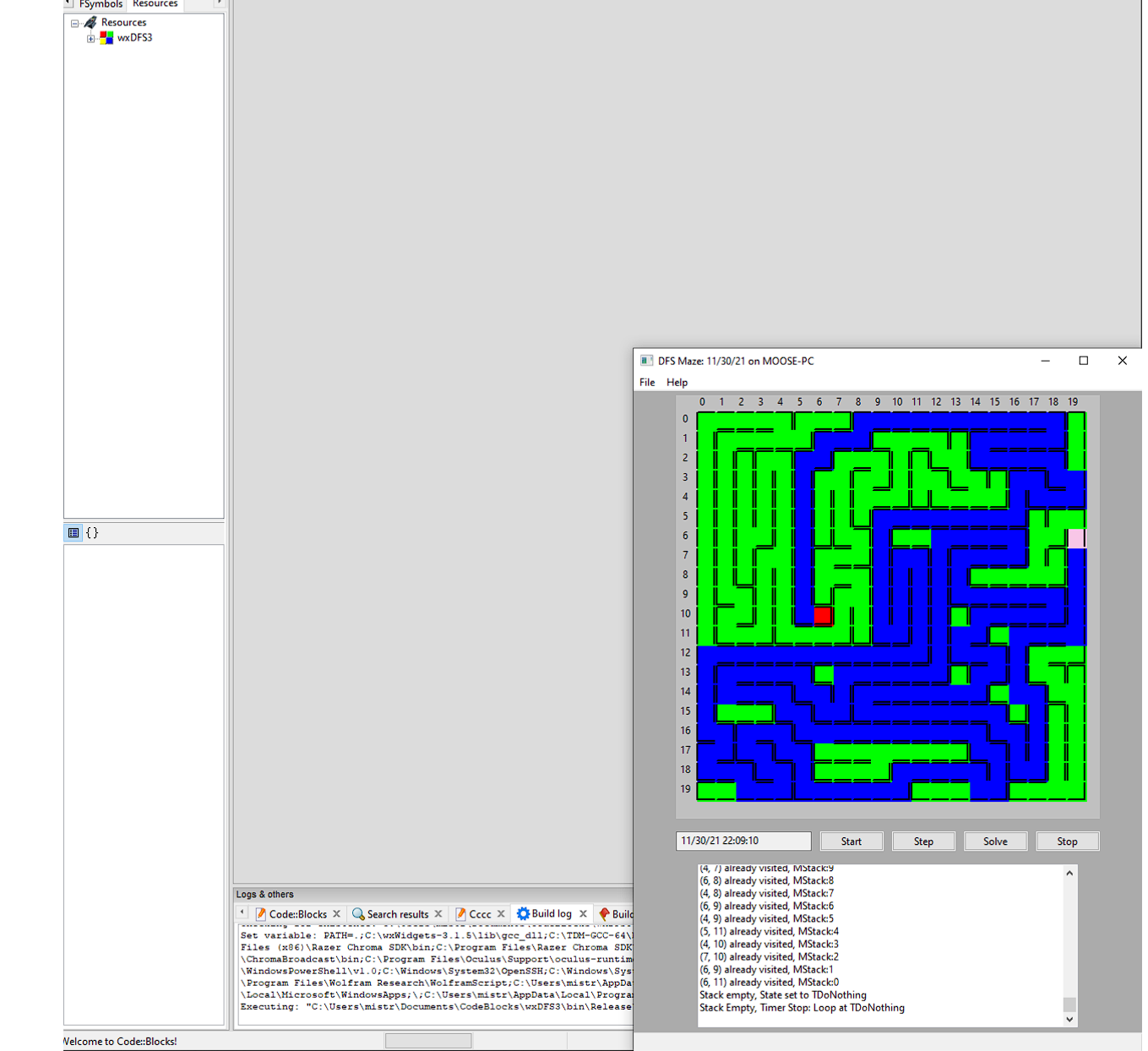
Programmed and developed a random maze generator that's able to find it's own solution using a septh First Search algorithm and implented on wxWidgets for GUI and C++.