Project Objectives
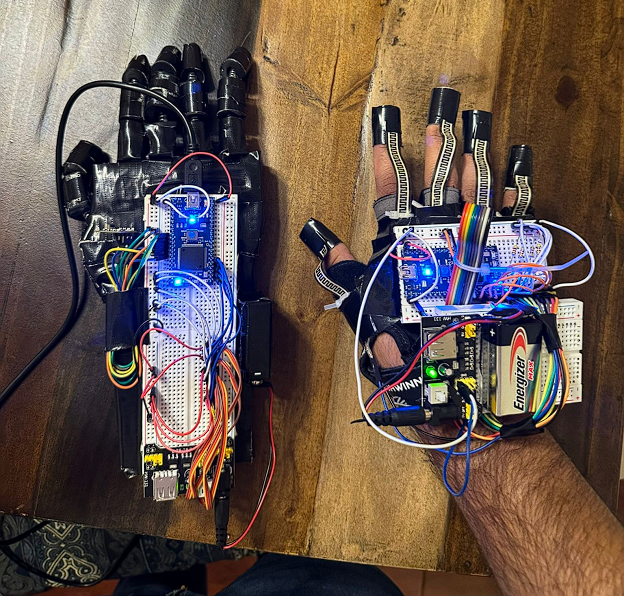
The objective of this project is to have a robotic hand mimic the movement of a separate “glove”. The “glove” is attached to several flex sensors while the robotic hand is using several servo motors. The method we’re using to connect the “glove” & robotic hand is to interface the flex sensors to the mbed LPC1768 board (Master) & interfacing the servo motors to a secondary mbed LPC 1768 board (Slave) to control the robotic hands.
Components Used
-5 Servo motors
-5 flex sensors
-2 nRF24L01P
-2 Mbed LPC1768 microcontrollers
-Breadboard’s
- Jumpers cables

Software
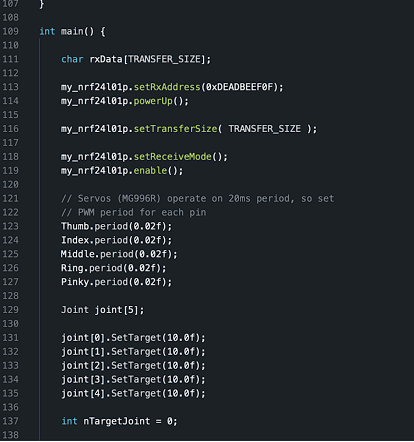
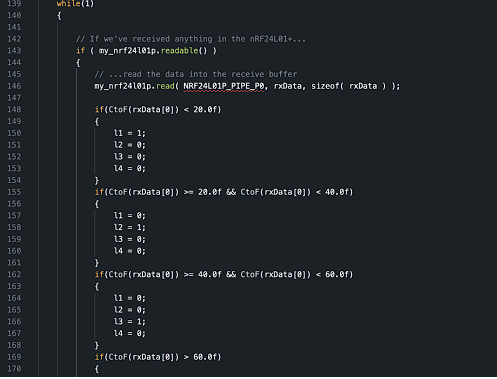
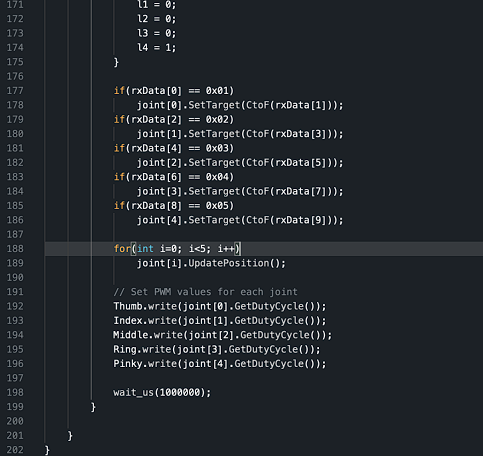
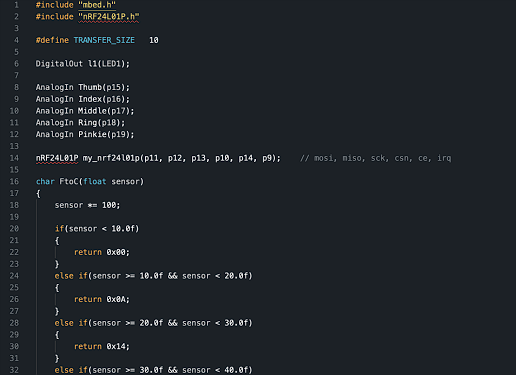
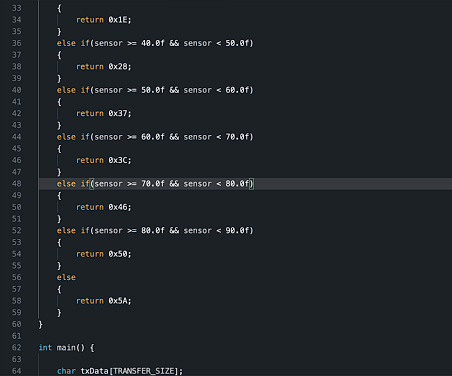
Code for Receiver:
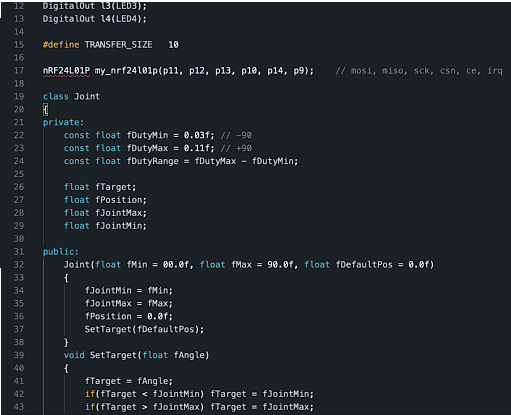
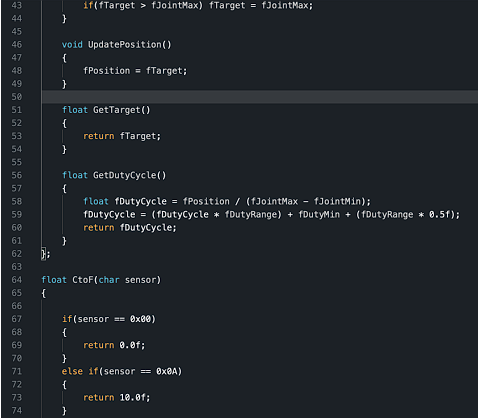
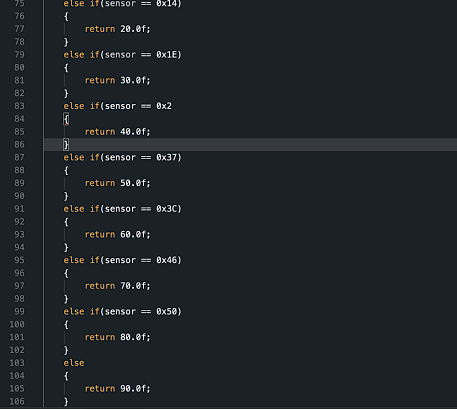
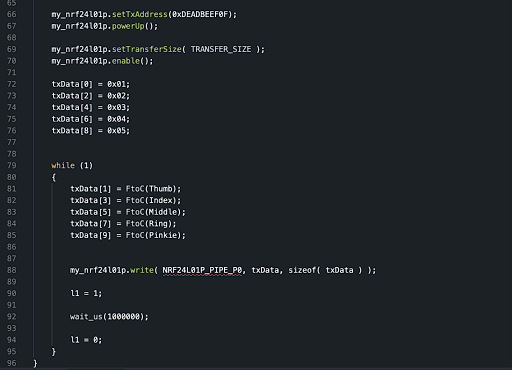
Code for Transmitter:
TROUBLESHOOTING
-We needed help connecting all 5 servo motors to the mbed board while also connecting the flex
sensors to the secondary mbed board.
-Another problem we had was interfacing the two mbed boards with each other through serial
connections.
-We used a few libraries to help us connect the sensor’s & motors to the mbed board &
each other
Recommendations and Conclusions
The way this project can be useful is by being a prototype for a few different projects such as a prosthetic, Simple/Complex Robots, and using the hand to operate possibly dangerous equipment & environments. The possible limitations to this project is the size of the circuit being too bulky for real use application or the signal length between the hand & “glove”. The advantages of this project is the low cost & low power consumption. We recommend using a more capable development board with more integrated features such as multiple serial connections & additional ADC’s